编码器总是坏?柔性连接与安装同轴度的重要性
伺服电机外置的旋转编码器,看似小巧,却常常是自动化设备停机的“罪魁祸首”。数据无故跳变、轴承频繁异响损坏,更换新品后不久又复发,问题往往不在编码器本身,而在于我们忽略了其背后至关重要的机械安装细节。这不仅是安装指南,更是对精密零部件的“呵护手册”。 致命的“硬连接”:联轴器的选型误区工程师最常犯的错误,就是将编码器轴与电机输出轴用刚性或不合适的弹性联轴器(如梅花、滑块联轴器)直接连接。这是一个致命的设计缺陷。任何机械装配都无法做到绝对的同心,哪怕是0.05mm的径向偏差,在高速旋转下都会转化为巨大的、周期性的径向力,直接冲击编码器内部脆弱的微型轴承,导致其寿命锐减,最终数据跳变或完全失效。 对于编码器这类精密测量元件,具备高扭转刚性和优异纠偏能力的柔性联轴器是唯一正确的选择。 联轴器类型 关键特性 适用场景 弹簧片联轴器 零背隙,高扭转刚度,通过金属弹簧片变形补偿偏心、偏角。 高速、高精度伺服系统,要求动态响应快,定位精准。 波纹管联轴器 零背隙,扭转刚度极高,一体式金属波纹管能补偿较大的轴向、径向和角度偏差。 对同轴度要求极为苛刻或安装空间受限的场合。 核心...

DFA 实战:让电工不骂娘的布线通道设计
作为机械工程师,我们设计的不仅是冷冰冰的金属结构,更是整个自动化系统的骨架。电气工程师常常在设备组装的最后阶段进场,面对的却是毫无规划的走线空间,这不仅拖累项目进度,也为日后的维护埋下隐患。一个优秀的机械设计,必须在3D模型建立之初,就将电气布线(Wiring)视为核心要素。这不仅是DFA(Design for Assembly)的基本要求,更是机电和谐共事的基石。 ## 顶层规划:型材槽盖 vs. 独立线槽设备走线的“第一公里”问题,往往就始于型材槽盖与独立线槽的抉择。两者并非简单的替代关系,而是应用于不同场景的策略选择。 特性 铝型材槽盖板 (Profile Slot Cover) 独立安装线槽 (Wire Duct) 优点 外观简洁,与机架一体化程度高,成本相对较低。 容量大,布线、查线、增线极其方便,强弱电易于分组。 缺点 容量有限,后期增减线路困难,线束挤压散热差。 占用额外空间,外观略显笨重,需要额外设计安装支架。 适用场景 传感器、电磁阀等末端、小批量线束的短距离走线。 主干道布线,从电柜到设备分支点的集中走线。 决策建议 将其视为设备的“毛...
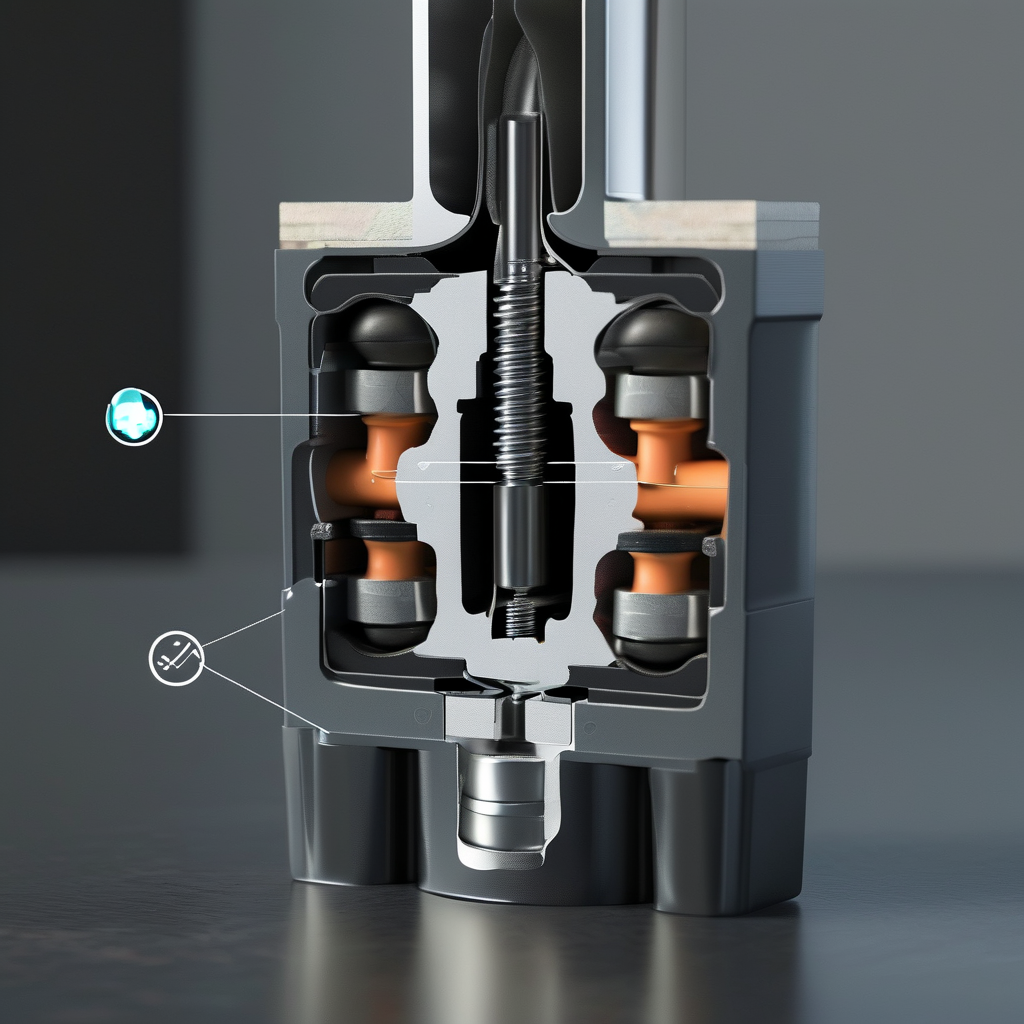
气缸撞击声太响?气压缓冲与液压缓冲器的调节艺术
在自动化设备设计中,气缸作为执行元件应用广泛。然而,许多工程师在调试过程中常忽视气缸末端缓冲的重要性,导致设备冲击大、噪音高、寿命短。常言道,细节决定设备的质感,而气缸末端缓冲的精细调校与合理选型,正是提升设备整体运行品质的关键细节。 一、气缸自带气缓冲的原理与调节几乎所有主流气缸,如SMC、Festo等,都提供内置的气缓冲功能(Air Cushion)。其原理是在气缸活塞杆接近行程末端时,活塞上的密封环会进入端盖内部的密封腔,将腔内残余的空气封闭起来。这部分被封闭的空气在活塞继续运动时被压缩,通过一个可调节的节流阀(通常是螺钉或针阀)缓慢排出。通过控制空气排出的速度,便能实现活塞的平稳减速,避免硬性冲击,俗称“软着陆”。 调节方法: 气缸端盖上的调节针阀是关键。 初始状态: 将调节阀完全关闭。 逐步开启: 慢慢逆时针方向旋转调节阀,每次旋转约1/4圈,观察气缸的运动状态和停止时的平稳性。 理想效果: 直到活塞在行程末端停止时没有明显的冲击声和反弹,运动平稳顺畅。如果过度开启,缓冲效果会减弱,甚至失效;如果过紧,则可能导致活塞行程不足,甚至无法到达终点。 气缓冲适合...

不仅会画图:用 ChatGPT 辅助生成 PLC 梯形图逻辑
作为机械工程师,我们时常面临一个尴尬的场景:设备主体结构和机械动作已经设计完毕,只差一个简单的顺序控制逻辑,比如几个气缸的先后动作。为了这点“小事”去排期、沟通电气工程师,不仅影响项目进度,也让我们感觉自身能力存在短板。如今,借助大型语言模型(LLM),我们完全有能力打通这“最后一公里”,提升自己作为项目“全栈工程师”的掌控力。 核心思路:将时序图思维注入 Prompt机械工程师最擅长的就是时序图(Timing Diagram)。我们脑中清晰地知道哪个气缸先动,哪个后动,传感器信号何时触发。关键在于,如何将这种图形化的逻辑,转化为 AI 能精准理解的文本描述。这本质上是一种“面向 AI 的需求分析”。 一个高质量的 Prompt 应该包含以下几个结构化模块: 1. I/O 定义 (Input/Output Definition): 清晰罗列所有输入和输出点。这是编程的基础,必须准确无误。 输入 (Inputs): 启动按钮、急停按钮、复位按钮、各气缸原位/末位磁性开关。 输出 (Outputs): 控制各气缸伸出/缩回的电磁阀。 2....

直线电机是智商税吗?直线传动方案的终极 PK
在精密自动化领域,驱动技术是核心。当工程师面对高速、高精度或长行程的运动需求时,直线电机(Linear Motor)、滚珠丝杆(Ball Screw)和同步带(Belt Drive)是三种常见且特性迥异的选择。深入理解它们的优劣,是实现系统性能与成本平衡的关键。 速度与加速度的碾压优势直线电机最显著的特点是其在速度和加速度方面的卓越性能。由于它取消了传统旋转电机到直线运动的机械转换环节,实现了“直驱”,其理论上的运动速度和加速度几乎只受限于供电能力和机械结构强度。在实际应用中,3G(约30m/s²)甚至更高加速度已非奢望,最高线速度可达数米每秒。这种能力对于需要频繁启停、快速响应的工况至关重要,能极大提升生产节拍和效率。 滚珠丝杆: 虽然能提供较高的精度,但受限于丝杆的临界转速(长径比引起的共振和“鞭打”效应)以及旋转惯量,其速度和加速度上限远低于直线电机。高速工况下,滚珠丝杆的磨损和发热问题也更为突出。 同步带: 结构简单,可实现长行程高速运动,但由于带的弹性形变,其定位精度较低,且在高速高加减速时容易出现抖动和带的寿命问题。其加速度通常也无法与直线电机相提并论。 ...

伺服刚性与联轴器:为什么此时必须用膜片式?
在自动化项目中,我们经常听到“刚性”这个词,尤其是在讨论伺服系统性能时。但“刚性”并非一个玄学概念,它是一个可以被设计、被量化,并直接决定设备性能上限的关键指标。很多时候,一个看似微不足道的机械元件,却成为整个控制系统的性能瓶颈。 联轴器:被忽视的“机械滤波器”我们通常认为联轴器(Coupling)的作用仅仅是连接电机轴和负载(如滚珠丝杆),传递扭矩。这没错,但只说对了一半。从动态响应的角度看,联轴器更像一个机械系统的“低通滤波器”。 一个理想的刚性连接,应该能无损、无延迟地传递所有频率的扭矩信号。但现实中,任何非刚性连接都会对高频信号产生衰减和相位滞后。伺服系统为了实现快速响应和精确定位,其控制指令中包含了大量的高频成分。如果联轴器“滤掉”了这些高频信号,伺服驱动器即便发出再精准的指令,负载端也无法忠实执行。 高动态响应的天敌:梅花联轴器的“滞后”梅花联轴器因其结构简单、成本低、对安装误差有一定补偿能力而被广泛使用。其核心在于中间的聚氨酯(PU)或尼龙材质的弹性体。这个弹性体在传递扭矩时会发生微小变形,这既是它的优点也是它的致命缺点。 优点: 能够吸收振动和冲击,保护电机和负...

告别键槽磨损:胀紧套(免键轴套)的设计应用
自动化设备中,传动连接件的可靠性是系统稳定运行的基石。然而,在诸多工业场景中,我们经常面临一个令人头疼的问题:设备频繁正反转时,平键连接极易发生“滚键”现象,轻则导致键槽和轴头磨损,重则直接报废昂贵的减速机输出轴或电机轴,带来巨大的停机损失和维护成本。这不仅仅是设计上的小疏漏,更是对传统连接方式在严苛工况下局限性的深刻警示。 面对此类高动态、高可靠性要求的应用,我们必须跳出传统思维,采纳更先进、更稳健的连接方案。胀紧套 (Locking Assembly) 便是其中一种卓越的替代品,它以其独特的摩擦传动原理,彻底解决了平键连接的固有缺陷。 胀紧套:摩擦传动的可靠之选胀紧套的核心优势在于其无键连接的特性。通过内外锥面螺栓的拧紧,将巨大的径向压力施加到轴和轮毂的接触面上,依靠纯粹的摩擦力来传递扭矩。这种均匀的应力分布避免了平键连接中键槽处的应力集中,从而有效防止了在频繁正反转或冲击载荷下的“滚键”和磨损。其优势显而易见: 高可靠性: 无键槽,无配合间隙,杜绝了磨损和冲击导致的失效。 高同心度: 安装后能确保轴与轮毂的完美同心,大幅减少振动。 安装与调整便捷: 无需精确的键槽对齐,可...

吸盘吸不住?真空发生器的流量与管径匹配计算
在自动化产线中,“掉件”往往是令人头疼的头号问题。尤其在真空抓取应用中,许多工程师,特别是经验尚浅者,常会陷入一个误区:以为只要真空度(例如显示为-80kPa)达到了要求,工件就一定能牢固吸附。然而,这种理解过于片面。一个可靠的真空抓取系统,远不止一个简单的压力值那么简单,它涉及到流量、管路设计、供气模式以及安全保障等多个层面的精细考量。 1. 流量(Flow Rate)的重要性:不仅要吸得住,更要吸得“稳”真空度(Pressure)代表的是静压,即最终能达到的负压水平。但对于实际工况,尤其是处理多孔材料(如纸板、某些未经致密的烧结件)或表面存在微小漏气(如铸件、注塑件表面飞边或微孔)的工件时,仅仅依靠静压是远远不够的。 此时,抽气流量(Flow Rate)变得至关重要。它衡量的是真空发生器或真空泵每分钟能抽走多少体积的空气。如果工件表面存在泄漏,真空系统需要有足够的流量来持续“补位”,抽走漏进来的空气,才能维持吸盘内部的有效真空。就好比一个水桶底部有个小洞,你不能只看桶里水的深度,还得看水龙头每分钟能补多少水。 实践建议: 在选型真空发生器或真空泵时,切勿只关注最终真空度。SM...
给变频器“开窗”:电控柜散热的机械流体分析
作为一名经验丰富的资深自动化工程师,我经常看到机械设计师在绘制电柜图纸时,对内部元器件的温升问题关注不足。这并非能力问题,而是专业侧重点的差异。然而,热管理在电柜设计中至关重要,它直接关系到电气设备的寿命、稳定性和整机运行可靠性。一台反复报过热故障的设备,哪怕机械结构再完美,也无法通过终验收。 我们来深入探讨几个关键的电柜热设计原则。 热空气管理:自然对流与对角线布局热空气上升、冷空气下降,这是最基本的物理原理。在电柜内部,元器件发热导致周围空气受热膨胀、密度降低,自然向上流动。因此,最有效的自然对流散热方案,是在电柜底部设置进风口,顶部设置出风口。 更进一步,为了确保气流能覆盖到柜内大部分区域,我们应采用对角线布局:在柜体一侧的底部设置进风口,在对侧的顶部设置出风口。这种布局能最大化气流在柜内的行程,有效带走热量。同时,要确保柜内元器件布局不要完全阻碍气流通道,例如在进出风口之间避免设置大面积的实心隔板。对于发热量大的元器件,应尽量放置在气流路径上。 滤网选型:防护等级与散热效率的平衡工业现场环境复杂,防尘、防溅水是电柜的基本要求,所以IP54防护等级是常见选择。然而,高防护等...
谐波减速机 vs RV 减速机:关节模组的选型生死局
精密减速机,作为自动化设备的核心传动部件,其选型直接决定了设备的性能上限与长期可靠性。面对谐波(Harmonic Drive)与摆线针轮(Cycloidal)两大主流精密减速技术,表面参数对比往往流于形式,深入理解其结构原理、失效模式及工程实践细节,才是高级工程师的必修课。 结构原理:柔轮变形 vs 摆线针轮谐波减速机:柔轮变形与多齿啮合谐波减速机,核心在于其独特的柔性齿轮(Flexspline)变形原理。它由三大基本部件构成: 波发生器(Wave Generator):一个椭圆形凸轮,内部通常有柔性轴承,是驱动柔轮变形的源头。 柔轮(Flexspline):薄壁筒形金属件,开口端加工有外齿。在波发生器作用下,其椭圆长轴方向的齿与刚轮啮合。 刚轮(Circular Spline):内部加工有内齿的刚性环形件,比柔轮多出若干齿(通常为2齿)。 工作时,波发生器旋转,迫使柔轮变形,使其长轴方向的齿与刚轮内齿啮合,短轴方向则脱开。由于柔轮与刚轮齿数差异,当波发生器旋转一周,柔轮相对刚轮会产生一个很小的角位移,从而实现极高的减速比。其优势在于结构紧凑、传动平稳、高精度。 摆线针轮减速...