
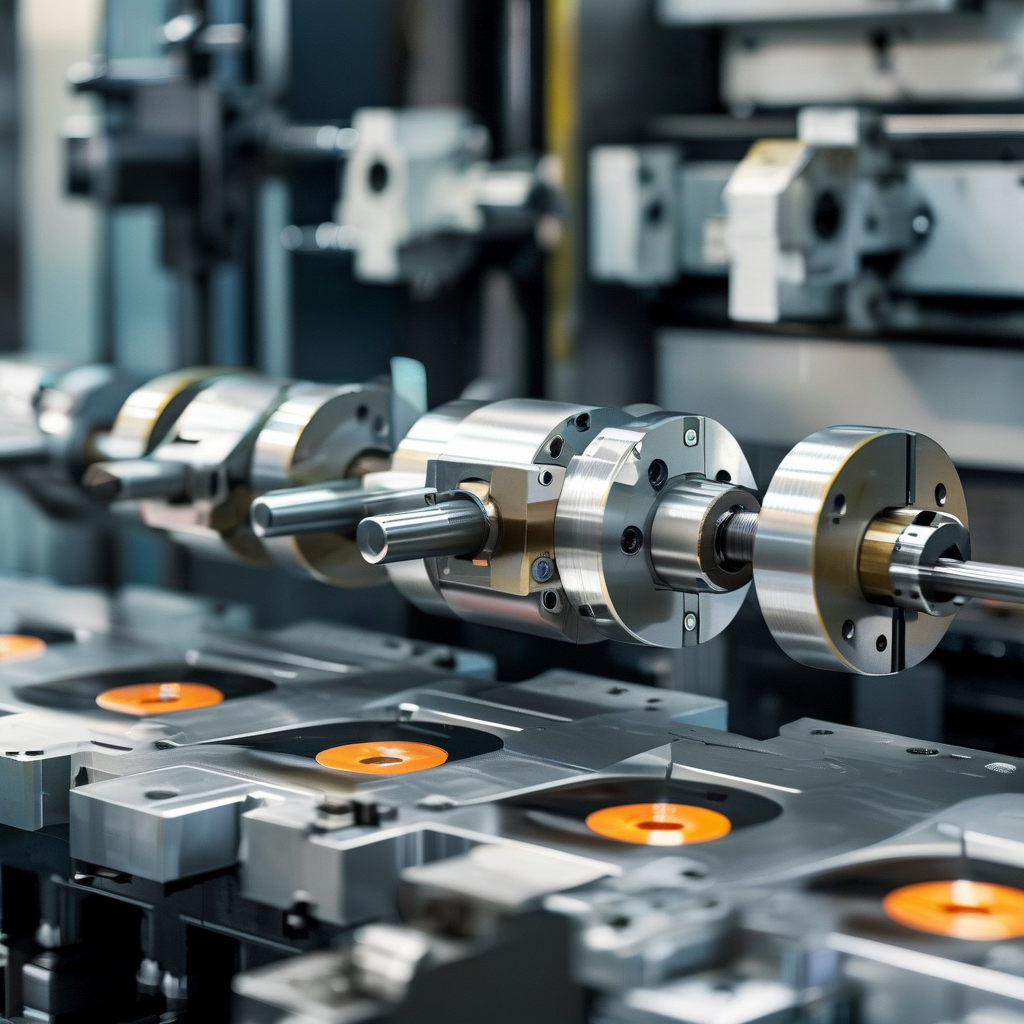
【案例】医疗设备设计:如何实现无死角清洁与维护?
在医疗与食品行业,设备设计的核心挑战远不止于实现功能,更在于构建一个能够抵御微生物侵袭、经得起严苛清洁流程的“堡垒”。今天,我将复盘一个为某高端乳制品无菌灌装线设计的阀岛集成模块案例,它完美诠释了“卫生设计”从理念到细节的落地。 1. 项目背景与核心矛盾客户的核心需求是在灌装阀切换过程中,确保绝对的无菌环境,并允许每天执行CIP(原位清洗)和SIP(原位灭菌)。这带来了一个经典的设计矛盾:复杂的多阀气路集成必然产生内部流道,而任何内部死角都是微生物滋生的温床,且难以清洁验证。 2. 结构设计:将“可清洁性”作为第一设计准则我们的解决方案摒弃了传统的多层叠加阀板设计,那种结构会在密封面之间形成致命的内凹角和缝隙。 整体式流道块设计:我们采用单块316L不锈钢,通过五轴联动精密加工一次性铣削出所有内部流道。这从根本上消除了零件拼接带来的缝隙。 流道形态的精心雕琢:所有内部流道均设计为全圆弧过渡,杜绝任何锐角。关键的是,我们将主流通管道设计为倾斜式,确保在CIP清洗时,流体能依靠重力完全排空,无任何积液。 外部形态的优化:模块外壳所有平面均设计为不小于3°的倾斜角,顶部避免平面堆积。...

【案例】高 G 冲击吸收:跌落试验机的缓冲结构设计
在跌落测试设备的设计中,冲击能量的吸收与释放是核心挑战。面对高能量、高频率的测试需求,缓冲方案的选择直接决定了设备的可靠性、测试数据的准确性以及长期维护成本。本文将复盘一个实际案例,对比主流方案,并深入解析最终采用的自适应液压缓冲设计。 1. 方案对比:液压、气弹簧与橡胶面对“吸收巨大冲击力并快速复位”的需求,我们首先评估了三种常见方案: 橡胶缓冲垫:成本最低,安装简单。但其缓冲过程本质上是非线性弹性变形,能量吸收依赖材料内耗,会产生较大的反弹。在多次高能量冲击下,易发生永久形变或疲劳开裂,性能衰减快,复位速度慢,不适用于高精度、可重复的测试场景。 气弹簧(带阻尼):提供可控的支撑力和缓冲。但其阻尼力相对较小,主要应对平稳支撑,难以瞬时耗散巨大的冲击动能。在高速冲击下,可能被“击穿”(瞬间压缩到底),导致刚性碰撞。 液压缓冲器:通过活塞挤压液压油,迫使油液通过细小节流孔产生阻尼力,将动能不可逆地转化为热能。其特点是能提供极大的瞬时阻尼力,平稳停止负载,且无反弹。复位则由内部弹簧或外部动力完成。这是应对高能量、高冲击工况的首选方案。 结论:从可靠性、可控性和寿命考虑,液压缓冲器...
【案例】精确分度:间歇输送线的分度机构设计
在一条精密装配线上,我们遇到了一个经典挑战:将小型金属工件以 ±0.05mm 的重复定位精度,进行步进式传送,节拍要求 ≤1.5秒/站。这本质上是一个高精度、高可靠性的间歇运动(Indexing) 问题。 方案对比:凸轮分度器 vs. 伺服驱动面对这个需求,我们首先评估了两个主流方案: 对比维度 凸轮分度器 (Cam Indexer) 伺服电机 + 行星减速机 核心原理 机械共轭凸轮,强制驱动 伺服系统电子凸轮曲线控制 定位精度 极高 (±0.01mm级),由机械保证,无累积误差 高 (±0.02mm级),依赖编码器反馈与系统刚性 运动特性 预定义的运动曲线(如修正正弦),冲击小 曲线可任意编程,柔性高 节拍/速度 极快且恒定,加减速由机械决定,无控制延迟 快,但受制于伺服加减速能力与系统惯量 成本 一次性投入高,但长期免维护 初期投入相对低,但需伺服驱动器、电缆等 可靠性/维护 极高,全机械结构,寿命长,几乎免维护 高,但涉及电气元件,有故障排查点 灵活性 低,分度角度与节拍固定,变更需更换凸轮 极高,通过参数可...

设计评审自动化:用代码检查图纸规范
在非标自动化设备设计领域,图纸是工程师与车间、供应商沟通的唯一“法律文件”。图纸的规范性直接决定了加工、装配的效率和最终设备的可靠性。然而,图纸审核环节存在一个普遍痛点:依赖人工目视检查图纸的字体、图层、标题栏、公差标注等是否符合公司规范,不仅耗时,而且极易因疲劳或疏忽导致遗漏。 一个未按规范填写的材料栏,可能导致车间错用 SUS 304 代替 Al 6061-T6,影响结构轻量化;一个遗漏的公差标注,可能让 CNC 操作员自行判断,加工出的 H7/g6 配合要么过紧卡死,要么过松产生异响。这些“低级错误”带来的返工成本和时间延误,在项目后期是灾难性的。 解决方案的核心思路是:将重复性、规则明确的检查工作交给机器,用程序的“绝对严谨”为人工设计的“创造性思维”保驾护航。 这并非要取代工程师,而是将其从繁琐的合规性校验中解放出来,专注于真正的结构优化与方案创新。 如何实现:利用 CAD 脚本进行自动化合规检查主流 CAD 软件(如 SolidWorks, Inventor, NX, CATIA)均提供了强大的 API(应用程序编程接口)。通过编写脚本(常用 VBA, C#...

机械自由职业者:如何搭建个人网站展示项目案例?
对于一名机械设计工程师而言,简历是敲门砖,但个人网站才是你的技术展厅与信任基石。在高度专业化的非标自动化领域,客户或雇主评估的不仅是你的技能列表,更是你解决复杂工程问题的系统性思维、对细节的掌控力以及职业化程度。一个专业的线上门户,能将这些抽象素质直观呈现。 一、为什么你需要一个个人网站:超越简历的信任引擎简历是二维的、压缩的;而项目是三维的、生动的。当你竞标一个涉及精密视觉定位与六轴机器人协同的项目时,仅凭简历中“精通机器人集成”几个字毫无说服力。但如果你在网站上展示了一个完整的项目案例:从初始的机构方案图、关键部件(如THK直线导轨、SMC电缸)的选型计算,到最终的调试视频与节拍分析,这构建的信任远超一纸简历。 更重要的是,网站是你个人品牌的永久资产。它7x24小时在线,向全球潜在客户或顶尖科技公司展示你的专业深度。当对方通过搜索你的名字或“精密装配自动化专家”等关键词找到你时,一个内容详实的网站能立刻建立权威感,这是被动获客的高效渠道。 二、平台选择:平衡专业、效率与掌控力选择平台的核心是专业呈现与维护效率的平衡。对于工程师,我推荐以下路径: WordPress(自托管)...

CAD API 编程:一键批量生成 PDF 和 DWG 图纸
在非标自动化项目中,设计评审和项目收尾阶段,工程师常被一项极其枯燥的“体力活”所困:手动批量处理工程图纸。典型场景是,项目结束时,需要将数百张 SolidWorks 工程图或 AutoCAD 的 DWG 文件,逐一打开并另存为 PDF 或特定版本的 DWG,用于发外加工或客户归档。这个过程不仅耗时数小时,而且重复操作极易出错。 本文将分享一个基于 SolidWorks API 的实战自动化解决方案,其核心思路同样适用于 Creo 或 AutoCAD。我们将使用 Python 作为粘合剂,因为它语法简洁、生态丰富,非常适合快速构建此类效率工具。 痛点剖析:为什么必须自动化?假设一个中型设备项目,包含 200 张工程图。手动操作流程如下: 打开 SolidWorks → 打开图纸 A → 另存为 PDF → 关闭。 重复步骤 1, 199 次。 过程中可能遇到图纸报错、软件卡顿,需要人工干预。 工程师成本:按每张图 1 分钟计,需 200 分钟,超过 3 小时。这消耗的是资深机械工程师的宝贵时间,其机会成本极高。质量风险:人工操作可能遗漏、覆盖错误文件。 技术选型:API 与 P...

机械工程师的小程序:用低代码搭建技术计算工具
在机械设计项目中,工程师们常常被一些看似简单却频繁出现的计算任务打断思路。例如,为气缸选型时反复计算推力 F = P × A × η,或是校核关键螺栓连接时套用预紧力公式 T ≈ 0.2 × σ_s × A_s × d。这些计算本身不复杂,但手动查表、代入、验算的过程琐碎且易错,尤其在方案迭代阶段,大量重复劳动严重拖慢了核心设计进度。 这正是低代码/无代码平台可以大显身手的地方。以国内常见的简道云为例,我们可以在半小时内,为一个设计团队搭建一个专属的“机械设计快速计算器”。 如何构建一个“气缸推力与螺栓预紧力”快速计算器核心思路是:将公式、参数和标准数据“固化”为可交互的表单与自动化流程。 创建数据表与表单: 在简道云中新建应用,并创建“气缸推力计算”和“螺栓预紧力计算”两张数据表。 设计表单字段。以气缸推力为例,字段应包括: 输入参数:工作气压 P (MPa)、缸径 D (mm)、杆径 d (mm)、负载率 η (%)。 选择参数:推力类型(推出/拉回)。可通过下拉框或单选按钮实现。 输出结果:理论推力 F (N)。该字段设置为“公式编辑”,其公式为: ...
AI 专利检索:如何快速锁定机械设计的技术空白点?
专利检索,对于工程师而言,既是寻找技术灵感的金矿,也是耗费心力的苦差。传统的关键词检索如同大海捞针,而面对动辄数十页、法律与技术术语交织的专利文献,快速理解其核心更是挑战。其核心痛点有二:信息过载下的理解障碍与海量数据中的模式盲区。 直接让 LLM 阅读整篇专利文档(PDF/文本)并提问,是低效的。关键在于构建结构化、引导式的 Prompt,将 LLM 定位为你的“高级技术分析助理”。 一、 精准拆解:从晦涩权利要求到清晰技术蓝图专利的核心是“权利要求书”,它定义了法律保护范围,但也最为晦涩。不要直接问“这篇专利讲什么”,而应命令 AI 进行角色扮演与结构化输出。 Prompt 模板示例: 12345你是一位经验丰富的[例如:机器人抓取]领域高级机械工程师。请分析以下专利文本,并严格按以下格式输出:1. **技术问题(痛点)**:用一两句话,从工程师视角总结该专利旨在解决的实际工程问题(例如:解决异形件真空抓取泄露率高的问题)。2. **核心解决方案**:用流程图或 bullet points 形式,拆解其独立权利要求 1 中记载的技术方案。请使用机械术语(如:采用...

传感器数据漂移:用 Excel/Python 进行趋势分析与预警
在自动化产线或大型设备的维护中,我们常遇到一个棘手的“灰色地带”:传感器数据(如温度、压力、振动)存在缓慢的、微小的漂移,但始终未触发PLC设定的硬性报警阈值。例如,一台关键液压站的出口压力,其设定报警上限为21MPa,但历史数据显示,其平均压力正以每月0.05MPa的速率缓慢爬升。从单日数据看,一切“正常”;但长期来看,这预示着密封件磨损、泵性能下降或滤芯堵塞,最终可能导致突发性停机,造成巨大生产损失。 这种“温水煮青蛙”式的失效模式,正是传统“事后维修”或基于阈值的“预防性维护”的盲区。要捕捉这些细微的趋势,我们无需复杂的AI模型,用经典的线性回归和移动平均法就能构建第一道有效的预警防线。 从数据噪声中提取趋势信号传感器数据通常包含高频噪声(测量波动、干扰)和低频趋势(设备性能的真实变化)。我们的目标就是过滤噪声,凸显趋势。 移动平均法:这是最直观的平滑方法。它通过计算连续数据点的平均值来消除短期波动。 应用场景:适用于观察短期(如最近24小时、一周)的数据中心化趋势,快速判断近期状态是否稳定。 操作方法(以Excel为例):假设A列是时间,B列是压力值。在C列(如C 3...

机械臂运动学:用 Python 快速求解正逆解
在自动化设备与机器人设计中,运动学分析是确保末端执行器精准到达目标位置的基础。传统上,工程师依赖昂贵的商业仿真软件(如RoboDK、MATLAB Robotics Toolbox)。然而,对于定制化需求高、或预算敏感的项目,掌握基于Python的自主分析能力,不仅能省下可观的软件授权费用,更能实现分析流程的深度定制与集成。本文将聚焦于串联机器人,探讨如何利用Python生态完成从建模到求解的全流程。 1. D-H参数法:从物理机构到数学模型D-H(Denavit-Hartenberg)参数法是描述串联机器人连杆与关节关系的经典方法。其核心思想是用四个参数来定义相邻连杆坐标系间的变换: **连杆长度 a_i**:沿 X_i 轴,从 Z_i 移动到 Z_{i+1} 的距离。 **连杆扭角 α_i**:绕 X_i 轴,从 Z_i 旋转到 Z_{i+1} 的角度。 **关节距离 d_i**:沿 Z_i 轴,从 X_{i-1} 移动到 X_i 的距离。 **关节转角 θ_i**:绕 Z_i 轴,从 X_{i-1
...